Главная
»
Самолетостроение
»
Автоматизированное проектирование конструкций
»
Передаточные механизмы. Общие характеристики (3.1). Описание привода (3.2). (2 Рис)
Передаточные механизмы. Общие характеристики (3.1). Описание привода (3.2). (2 Рис)
3.Передаточные механизмы
3.1.Общие характеристики передаточных механизмов
Для согласования характеристик между двигателем и исполнительным механизмом устанавливают механическую передачу. Механическая передача – устройство, которое преобразует движение и перемещает его в пространстве.
Различные передачи можно представить в виде трех больших групп:
1• Передачи вращательного движения.
2• Передачи, преобразующие вращательное движение в поступательное.
3• Передачи, преобразующие движение по заданному закону.
Передачи вращательного движения разделяются на передачи зацеплением (зубчатые, червячные, волновые, цепные) и трением (ременные, фрикционные). Наиболее применяемыми среди передач зацеплением являются зубчатые.
Преобразование вращательного движения в поступательное реализуется винтовым механизмом скольжения: шариковинтовым или планетарновинтовым.
Для преобразования закона движения используются передаточные механизмы специального вида – рычажные, кулачковые, мальтийские.
При расчете передач используют несколько иную форму записи известных физических соотношений.
1. Угловая скорость ω, [ω]=обор/сек.
ω=2πn/60 (1)
где n – частота вращения, измеряемая в оборотах в минуту
2. Линейная скорость v, [v]=м/сек.
v= ω (d/2)= π n d / 60•10³ (2)
где d/2 – радиус кривизны точки вращения, выраженный в мм
3. Мощность вращательного движения Р, [Р]=Вт.
Р=Т ω=(Т π n) / 30 (3)
Т – момент вращения, [Т]=Н м.
Если же мощность выражается в киловаттах, [Р]=кВт, то
Р= Т ω=(Т π n 10ˉ³) / 30 (4)
откуда
Т= 9550 ( Р / n ) (5)
4. Передаточное отношение u (у).
u= ω1 / ω2 (6)
ω1 – угловая скорость вращения на входе,
ω2 – угловая скорость вращения на выходе.
3.2. Описание привода
Устройство, приводящее в движение машину или механизм, носит название привода. В общем виде привод включает в себя двигатель и передаточный механизм.
Пример такого привода показан на Рис.3..1 . Он состоит из электродвигателя (1), ременной передачи (2), двух пар цилиндрических зубчатых колес (3) и цепной передачи (4). Частота вращения на входе равна n1, на выходе – n5.
Если механизм, состоящий из одной или нескольких пар зубчатых колес предназначен для уменьшения частоты вращения, то он называется редуктором, а служащий для увеличения частоты вращения – мультипликатором.
Колесо, которое инициирует движение, называется ведущим.
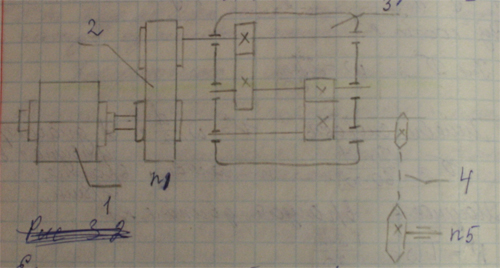
Рис.3..1. Пример привода.
На Рис.3..2 приведен пример схематичного представления одноступенчатого цилиндрического зацепления, которое передает вращательное движение от ведущего вала непосредственно на ведомый, без каких-либо промежуточных элементов.
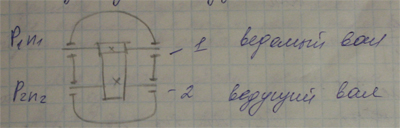
Рис.3..2. Одноступенчатое цилиндрическое зацепление.
В общем случае передаточный механизм как инструмент изменения кинематических и силовых параметров можно представить в виде кинематической схемы последовательно соединенных элементов (или звеньев).
Друзья! Приглашаем вас к обсуждению. Если у вас есть своё мнение, напишите нам в комментарии.