Главная
»
Самолетостроение
»
Прикладная механика
»
Кинематика точки. Способы задания положения точки в пространстве.
Кинематика точки. Способы задания положения точки в пространстве.
Кинематика точки. Способы задания положения точки в пространстве.
При исследовании кинематических параметров мат.точки вводится 3 способа заданий ее положенияв пространстве, которые позволяютв разных системахкоординат в зависимости от поставленной задачи построить мат.модель объекта, оптимальную с точки зренияисследования движения объектов данной постановки и хорошо приспособленной для реализации вычислительной техники.
1. Векторный способ задания движения точки.
Пусть точка М движется по отношению к некоторой системе отсчета Oxyz. Положение этой точки в любой момент времени можно определить, задав ее радиус-вектор  , проведенный из начала координат О в точку М (рис. 1).
, проведенный из начала координат О в точку М (рис. 1).
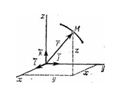
При движении точки М вектор будет с течением времени изменяться и по модулю, и по направлению. является переменным вектором (вектором-функцией), зависящим от аргумента t :  . Равенство определяет закон движения точки в векторной форме, так как оно позволяет в любой момент времени построить соответствующий вектор и найти положение движущейся точки.
. Равенство определяет закон движения точки в векторной форме, так как оно позволяет в любой момент времени построить соответствующий вектор и найти положение движущейся точки.
Геометрическое место концов вектора , т.е. годограф этого вектора, определяет траекторию движущейся точки. Мгновенная скорость: ,  .
.
2. Координатный способ задания движения точки.
Положение точки можно непосредственно определять ее декартовыми координатами х, у, z (рис.1), которые при движении точки будут с течением времени изменяться. Чтобы знать закон движения точки, т.е. ее положение в пространстве в любой момент времени, надо знать значения координат точки для каждого момента времени, т. е. знать зависимости ,  .
.
Уравнения представляют собой уравнения движения точки в прямоугольных декартовых координатах. Они определяют закон движения точки при координатном способе задания движения.Чтобы получить уравнение траектории надо из уравнений движения исключить параметр t .Нетрудно установить зависимость между векторным и координатным способами задания движения.Разложим вектор на составляющие по осям координат:  где
где  проекции вектора на оси;
проекции вектора на оси;  – единичные векторы направленные по осям, орты осей.Так как начало вектора находится в начале координат, то проекции вектора будут равны координатам точки M. Поэтому
– единичные векторы направленные по осям, орты осей.Так как начало вектора находится в начале координат, то проекции вектора будут равны координатам точки M. Поэтому 
Вектор скорости точки  , учитывая, что
, учитывая, что  найдем:
найдем:  .Зная проекции скорости, найдем ее модуль и направление (т.е. углы
.Зная проекции скорости, найдем ее модуль и направление (т.е. углы  , которые вектор образует с координатными осями) по формулам ;
, которые вектор образует с координатными осями) по формулам ; .
.
Примечание.Движение точки может быть задано с помощью и других координат. Например, цилиндрических или сферических. Среди них будут не только линейные размеры, но и углы
3. Естественный способ задания движения точки.
3. Естественный способ задания движения точки.

Естественным способом задания движения удобно пользоваться в тех случаях, когда траектория движущейся точки известна заранее. Пусть кривая АВ является траекторией точки М при ее движении относительно системы отсчета Oxyz (рис.3) Выберем на этой траектории какую-нибудь неподвижную точку О', которую примем за начало отсчета, и установим на траектории положительное и отрицательное направления отсчета (как на координатной оси).Тогда положение точки М на траектории будет однозначно определяться криволинейной координатой s, которая равна расстоянию от точки О' до точки М, измеренному вдоль дуги траектории и взятому с соответствующим знаком. При движении точка М перемещается в положения M1, М2,... . следовательно, расстояние s будет с течением времени изменяться.Чтобы знать положение точки М на траектории в любой момент времени, надо знать зависимость  . Уравнение выражает закон движения точки М вдоль траектории.
. Уравнение выражает закон движения точки М вдоль траектории.
Скорость точки есть первая производная по времени от закона движения:
Ускорение:  .
.
Друзья! Приглашаем вас к обсуждению. Если у вас есть своё мнение, напишите нам в комментарии.