Главная
»
Самолетостроение
»
Теория информационных процессов и систем
»
Равномерная дискретизация. Теорема Котельникова. Представление сигнала рядом Котельникова.
Равномерная дискретизация. Теорема Котельникова. Представление сигнала рядом Котельникова.
Равномерная дискретизация. Теорема Котельникова
При равномерной дискретизации шаг ∆t и частота отсчетов являются постоянными величинами. Точки отсчетов в этом случае равномерно размещены по оси t.
Устройства, с помощью которых проводится дискретизация сигналов, носят название дискретизаторов. На рис. 4.2. изображена функциональная схема дискретизатора.
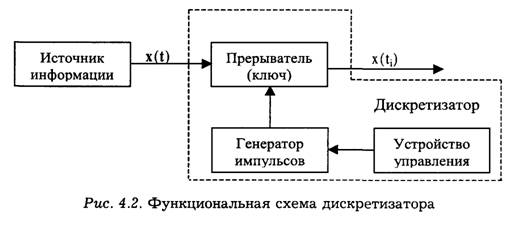
Дискретизатор можно рассматривать как прерыватель исходного сигнала x(t). Генератор импульсов выдает на вход прерывателя некоторую последовательность импульсов, в результате чего входной сигнал x(t) преобразуется в последовательность дискретных выборок сигнала x(t). Работа генератора импульсов определяется устройством управления. В случае равномерной дискретизации частота импульсов, поступающих от генератора, является неизменной.
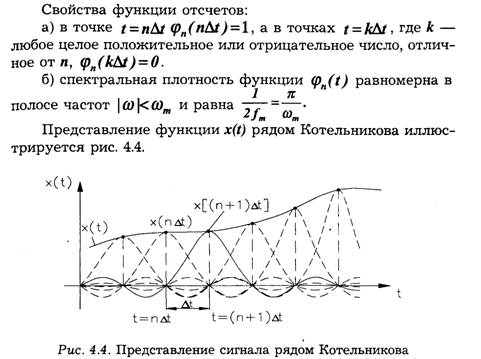
В. А. Котельниковым доказана теорема для функций с ограниченным (финитным) спектром (теорема отсчетов), которая формулируется следующим образом: если наивысшая частота в спектре функции x(t) меньше, чемƒm, то функция x(t) полностью определяется последовательностью своих значений в моменты, отстоящие друг от друга не более чем на  секунд.
секунд.
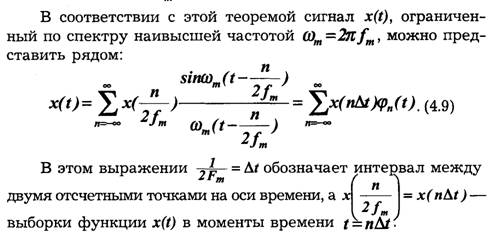
Интерполяционный ряд вида (4.9) носит название ряда Котельникова. (В иностранной литературе этот ряд связывают с именами Найквиста и Шеннона.)
Пусть сигнал, описываемый непрерывной функцией времени x(t), имеет ограниченный спектр, т. е. преобразование Фурье:

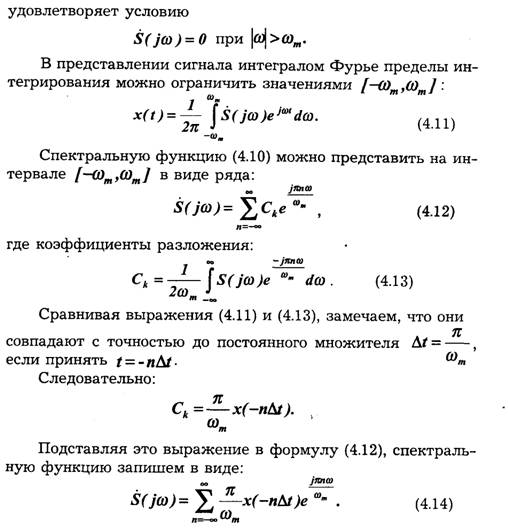
Подставим выражение (4.14) в формулу (4.11), изменив при этом знак при п с учетом, что суммирование проводится по всем отрицательным и положительным значениям п.Кроме того, учитывая сходимость ряда и интеграла Фурье, изменим порядок операций интегрирования и суммирования:
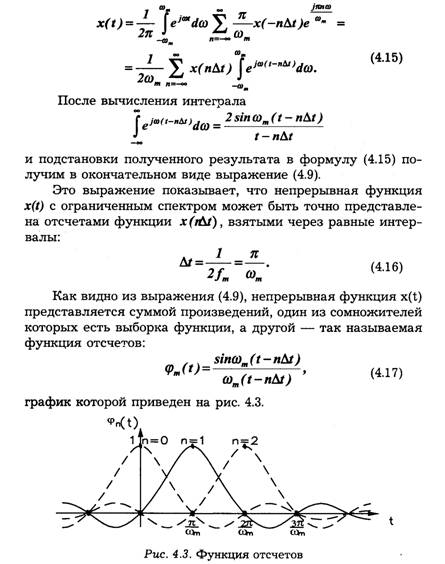
При выводе (4.9) предполагалось, что x(t) удовлетворяет условиям Дирихле. Это не дает возможности использовать полученный результат для функций, не стремящихся к нулю при t →∞, или для функций, не интегрируемых на интервале (а, в).
Теорема Котельникова относится к сигналам с ограниченным спектром. Реальные сообщения имеют конечную длительность. Спектр таких сигналов не ограничен, т. е. реальные сигналы не соответствуют модели сигнала с ограниченным спектром, и применение теоремы Котельникова к реальным сигналам связано с погрешностями при восстановлении сигналов по формуле (4.9) и неопределенностью выбора шага дискретизации (4.16) или частоты отсчетов F0=2fm.
Приведенные соображения свидетельствуют, что применение теоремы Котельникова к реальным сигналам вызывает определенные трудности в том случае, если теорема рассматривается как точное утверждение. Для практических условий, однако, идеально точное восстановление функций не требуется, необходимо лишь восстановление с заданной точностью. Поэтому теорему Котельникова можно рассматривать как приближенную для функций с неограниченным спектром.
Практически всегда можно определить наивысшую частоту спектра fm так, чтобы хвосты функции времени, обусловленные отсеканием частот, превышающих fm, содержали пренебрежимо малую долю энергии по сравнению с энергией исходного сигнала x(t). При таком допущении для сигнала длительностью Т с полосой частот общее число независимых параметров [т. е. значений x(n∆t) ], которое необходимо для полного задания сигнала, очевидно, будет:
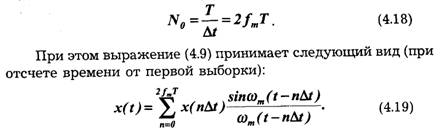
Величина N0 представляет собой число степеней свободы сигнала x(t), так как даже при произвольном выборе значений x(r∆t) сумма вида (4.19) определяет функцию, удовлетворяющую условиям заданного спектра и заданной длительности сигнала.
Параметр B=N0, который широко применяется в системах передачи информации, называют базой сигнала.
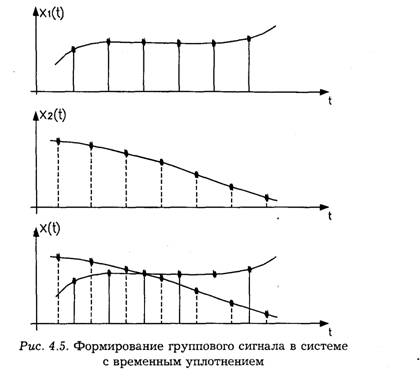
Представление сигналов в виде ряда Котельникова положено в основу построения систем передачи информации с временным уплотнением. Смысл временного уплотнения состоит в том, что в интервале времени между двумя соседними отсчетами одного сигнала можно передавать отсчеты других сигналов. Формирование такого группового сигнала показано на рис. 4.5.
В заключение данного параграфа заметим, что хотя теорема Котельникова базируется на модели сигнала с ограниченным спектром, она имеет большую теоретическую и практическую ценность. Поэтому представление сигналов рядом Котельникова наиболее широко применяется в технике преобразования, передачи и обработки информации.
Друзья! Приглашаем вас к обсуждению. Если у вас есть своё мнение, напишите нам в комментарии.