Главная
»
Информационные системы
»
Компьютерная геометрия и графика
»
Двумерные алгоритмы. Преобразование координат: сдвиг, поворот.
Двумерные алгоритмы. Преобразование координат: сдвиг, поворот.
Двумерные алгоритмы. Преобразование координат: сдвиг, поворот.
Преобразование и новые координаты.
Рассмотрим следующую систему уравнений

Эти уравнения можно интерпретировать двояким образом:
- Все точки на плоскости ху переместились вправо на расстояние а
- координатные оси х и у переместились влево на расстояние а
Этот простой пример иллюстрирует принцип, применимый и к более сложным ситуациям. Мы будем рассматривать системы уравнений, обычно записываемых в виде произведения матриц, интерпретируя их как преобразование всех точек в фиксированной системе координат. Однако та же самая система может интерпретироваться и как изменение системы координат.
Пусть необходимо повернуть точку Р(х,у) вокруг начала координат О на угол φ. Изображение новой точки обозначим P’(x’,y’). Существуют четыре числа а,b,c,d, такие, что новые координаты х’, y’ могут быть вычислены по значениям старых координат х и у из следующих уравнений
x'=ax+by
y'=cx+dy
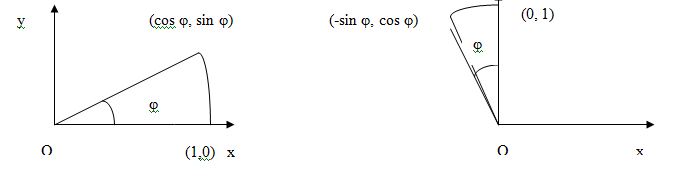
Для получения значений а,b,c,d рассмотрим вначале точки (х, у) = (1, 0). Полагая х=1 и у=0 в этой системе получим
x’=a
y’=c.
Но в этом простом случае,как это видно из следующего рисунка, значения x’ и y’ равны соответственно cos φ и sin φ. Тогда будем иметь
а = cos φ
с = sin φ
Аналогичным образом из второй половинки рисунка следует
b = - sin φ
d = cos φ
Тогда исходную систему можно переписать
x’ = x cos φ – y sin φ
y’ = x sin φ + y cos φ
Поворот
Эта система описывает поворот вокруг начала координат, но обычно это не то, что требуется. Если требуется выполнить поворот относительно заданной точки (х0,у0),то в этом уравнении можно заменить х на х-х0, у на у-у0, x’ на x’-x0, y’ на у‘-у0
x' –x0=(x-x0) cos φ- (y-y0) sin φ
y' – y0=(x-x0) sin φ + (y-y0) cos φ (2)
Матричная запись
Система уравнений (2) может быть записана в виде одного матричного уравнения
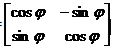
[x’ y’]= [x y] 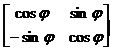
или с использованием вектора столбца
 =
=

уравнение переноса можно записать в виде
[x’ y’] =[x y 1]  , но лучше записать в виде
, но лучше записать в виде
[x’ y’ 1] = [x y 1]  .
.
Запись каждого преобразования в форме произведения матриц позволяет совмещать несколько преобразований в одном. Чтобы показать такое совмещение преобразований, объединим поворот с двумя переносами
Поворот на угол φ вокруг начала координат запишем в форме
[x’ y’ 1] = [x y 1]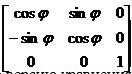
\
Выведем новую версию уравнения для описания поворота на угол φ вокруг точки (х0 у0). Это уравнение может быть выражено формулой
[x’ y’ 1] = [x y 1] R, где через R обозначена матрица 3 х 3.
Для нахождения этой матрицы R будем считать, что преобразование состоит из трех шагов с промежуточными точками (u1 v1), (u2 v2).
- Преобразование переноса точки (х0 у0) в начало координат О.
Т’ = 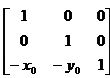
- Поворот на угол φ относительно начала координат О.
[u2 v2 1]=[u1 v1 1] R0, где
R0 = 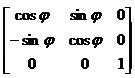
3. Перенос из начала координат в точку (х0 у0)
[x’ y’ 1] = [u2 v2 1] T, где
T = 
Возможность комбинации этих шагов основано на свойстве ассоциативности матричного умножения
(А В) С = А (В С) или А В С
Теперь найдем
[x’ y’ 1] = [u2 v2 1] T =
= ([u1 v1 1] R0) T =
= [u1 v1 1] R0 T =
= ([x y 1] T’)R0 T =
= [x y 1] T’R0 T =
= [x y 1] R
где
R=T’ R0 T
Это и будет искомая матрица, которая после выполнения матричного умножения даст
R =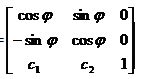
Где введены обозначения
c1 = x0 - x0 cos φ + y0 siun φ
c2 = x0 – x0 sin φ – y0 cos φ .
Друзья! Приглашаем вас к обсуждению. Если у вас есть своё мнение, напишите нам в комментарии.