Главная
»
Информационные системы
»
Компьютерная геометрия и графика
»
Перспективное преобразование.
Перспективное преобразование.
Здесь мировые координаты уже не будут затрагиваться. Поэтому видовые координаты будут обозначаться просто (x, y, z) вместо (xe, ye, ze).
На рисунке выбрана точка Q, видовые координаты которой равны (0, 0, d) для некоторого положительного числа d. Плоскость z=d определяет экран, который будем использовать.
Таким образом, экран – это плоскость, проходящая через точку Q и перпендикулярная оси z. Экранные координаты определяются привязкой начала координат к точке Q, а оси
Х и Y имеют такие же направления, как оси х и у соответственно. Для каждой точки объекта Р точка изображения Р’ определяется как точка пересечения прямой линии РЕ и экрана. Чтобы упростить рисунок, будем считать, что точка Р имеет нулевую у-координату. Но все последующие уравнения для вычисления ее у-координаты также пригодны и для любых значений координаты Х.
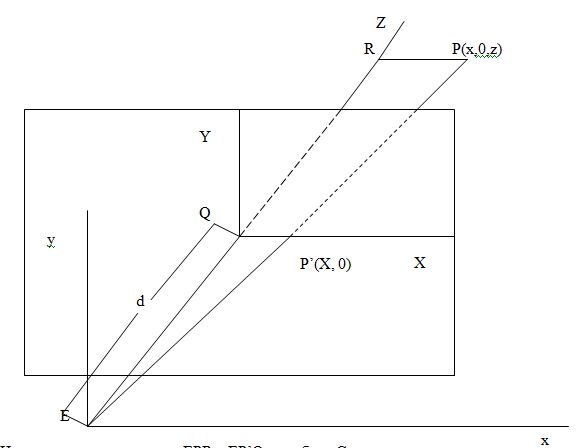
На рисунке треугольники EPR и EP’Q подобны. Следовательно,

Отсюда будем иметь


Аналогично можно получить

Ранее было введено предположение, что точка О начала системы мировых координат примерно совпадает с центром объекта. Поскольку ось z видовой системы координат совпадает с прямой ЕО, которая пересекает экран в точке Q, то начало Q системы экранных координат будет находиться в центре изображения. Если потребовать, чтобы это начало координат располагалось в нижнем левом углу экрана, а размеры экрана составляли 2с1 по горизонтали и 2с2 по вертикали, то наши последние уравнения можно заменить на следующие

Нам еще требуется определить расстояние между точкой наблюдения Е и экраном. Грубо говоря, мы имеем соотношение:
 ,
,
что следует из подобия треугольников EP’Q’ и EPQ на следующем рисунке
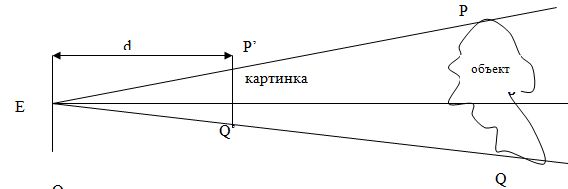
Отсюда получим
Друзья! Приглашаем вас к обсуждению. Если у вас есть своё мнение, напишите нам в комментарии.